روباتی که با لمس اشیا آنها را تشخیص می دهد
دانشمندان دانشگاه کالیفرنیای برکلی با الهام از قدرت لمس، یک چارچوب ادراکی برای روبات هایی طراحی کرده اند تا بتوانند با لمس اشیا آنها را تشخیص دهند.
VentureBeat- انسانها بسیاری از دانش و دانستههای خود درباره جهان اطرافشان را از طریق لمس آموختهاند. تحقیقات نشان میدهد که یادگیری حرکتی– لمسی موجب تقویت نتایج یادگیری حتی در کسانی میشود که آموزش از طریق دیدن یا شنیدن یا خواندن و نوشتن را ترجیح میدهند. یادگیری از طزیق حرکتی– لمسی نوعی سبک یادگیری است که دانشآموزان در آن به جای گوش دادن به حرفهای معلم یا نگاه کردن به کارهای او، خودشان با انجام فعالیتهای فیزیکی و لمس و کار کردن با دستگاه یا شی مورد نظر، یاد میگیرند.
بر همین مبنا نیز محققان دانشگاه کالیفرنیا از حس لامسه انسان الهام گرفتند و نوعی سیستم ادراکی برای روباتها توسعه دادند که نتیجه آن بیشتر متکی به لمس کردن اشیا است؛ نه مشاهده آنها. محققان برای این کار از مطالعات و پژوهشهای محققان دانشگاه کارنگی ملون استفاده کردند که نوعی سیستم هوش مصنوعی است که با مشاهدات فیزیکی برخی اشیای خاص، آنها را تشخیص میدهد.
محققان دانشگاه برکلی در این مورد میگویند: انسانها به طور طبیعی ویژگیهای ظاهری و جنس مواد اشیا را در حالتهای مختلف تشخیص میدهند. ادراک ما ماهیتی چند حالته دارد. مثلا وقتی اسباببازی نرمی میبینیم و آن را لمس میکنیم، نرمی آن را در ذهن تصور میکنیم. یا زمانی که لبههای قیچی را لمس میکنیم، میتوانیم آن را در ذهنمان تجسم کنیم. در واقع آنچه در ذهن ما نقش میبندد، فقط هویت آنها نیست، بلکه شکل و اندازه و نسبتهای آنها را نیز در ذهنمان حدس میزنیم. در این پروژه نیز سعی کردهایم ماهیت چند حالته حاصل از لمس روباتیک و میزان دفت آن در فراگیری روبات را بررسی کنیم.
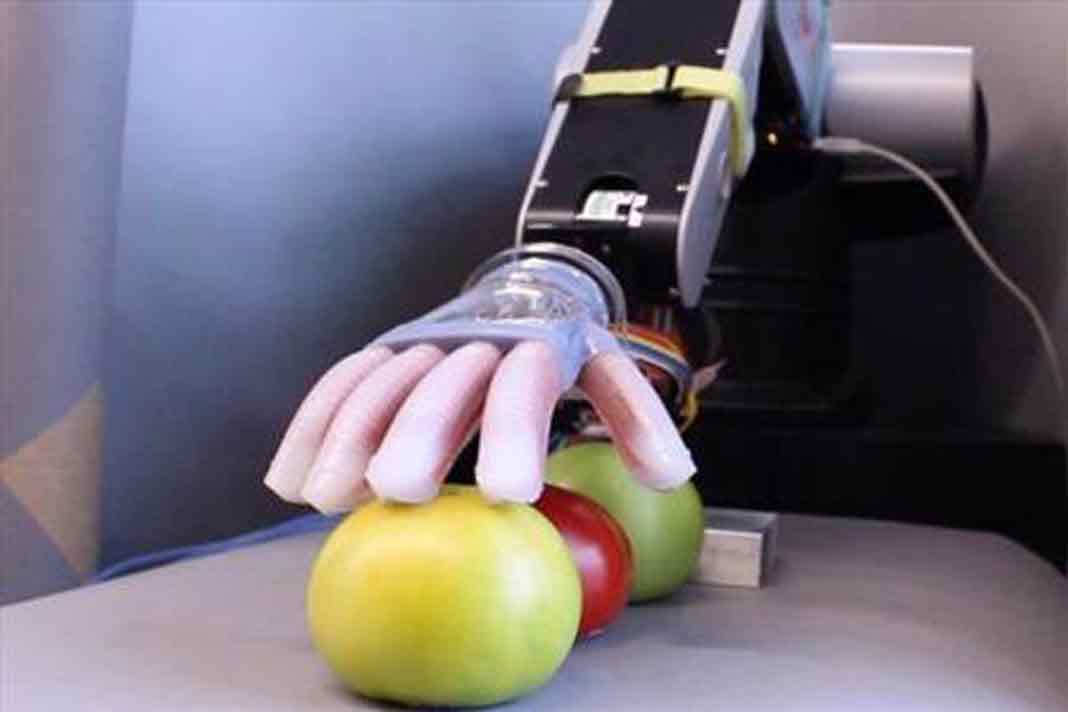
محققان توضیح میدهند که حسگرهای لمسی روبات، قدرت دید همه جانبه حسگرهای تصویری را ندارند و با توجه به ویژگیهای سطحی عمل میکنند. علاوه بر اینها، تفسیر این یافتههای لمسی کار سختتری است. آنها برای مبارزه با این چالشها از حسگر لمسی با عنوان Gelsight با رزولوشن بالا استفاده کردند و آن را با شبکه عصبی پیچشی مصنوعی ترکیب کردند تا نوعی هوش مصنوعی برای تحلیل تصاویر بصری به دست آورند. حسگر لمسی GelSight دوربینی دارد که تغییر شکلهای ناشی از لمس شی را بررسی میکند و از همان زمان تولید اطلاعات را شروع میکند.
محققان دو تا از این حسگرها را روی انگشتان یک بازوی روباتیک با نام گریپر نصب کردند تا زمانی که انگشتان آن دور شی هدف قرار گرفت، یافتههای حاصل از تماس حسگرهای لمسی را نیز جمعآوری کنند.
آنها با این کار موفق شدند سیستم هوش مصنوعی را ارتقا دهند و میزان درستی و دقت آن را برای تشخیص هویت اشیای مختلف به 3/64 درصد برسانند.